

As part of a pilot project, Navel is now also being used in nursing homes run by the Evangelische Heimstiftung and Johanniter Seniorenhäuser. Navel’s empathic interaction is intended to provide additional emotional and cognitive stimulation for those in need of care. At the same time, the aim is to relieve […]
News english

Small series production of Navel has started
We are very happy that we have now been able to start the small series production of Navel. We now want to produce around 5 robots per month and deliver them to our customers, who are already eagerly awaiting Navel. On the one hand, these are customers in the research field […]

artificial empathy at ZDF – Navel on German television
Understanding others, feeling with them, understanding what they think, what moves them: Empathy is the glue that holds our society together, the core competence in social interaction, and the competence goal of social robots. Biologist Jasmina Neudecker wants to find out more about it in the new “Terra Xplore” season […]
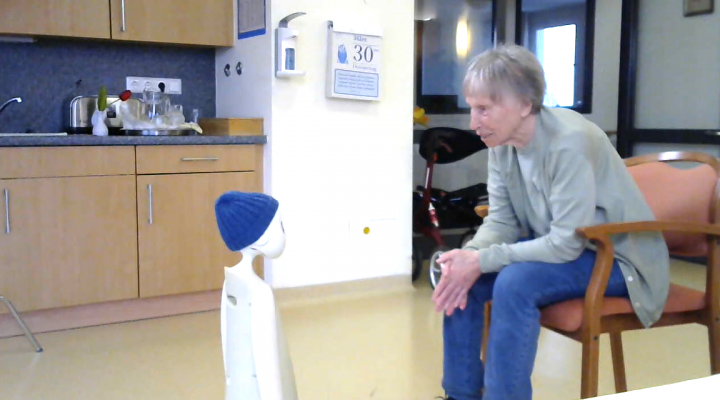
“In-The-Wild” Test: Navel in the nursing home
We were once again in a nursing home with Navel and tested the latest prototype. Thanks to the Pflegezentrum Eichenau, a home of the Innere Mission München. We had a total of 7 test subjects: male and female nursing home residents who are still relatively fit cognitively. Some, however, have […]

Navel excites HRI researchers at Stockholm conference
Last week we were at HRI23 in Stockholm with Navel. This international conference is the most important in the field of Human-Robot Interaction. Many renowned researchers were there and looked at and reviewed Navel with a critical eye. I am happy to say that everyone was very enthusiastic about Navel. […]
Funding round completed.
We are happy to have found a great experienced team of investors with a fantastic network and broad know-how in the area of hardware startups as well as in the area of elderly care. So we are ready for the first small batch production and our adorable social robot Navel […]

Navel on the front page of the Süddeutsche Zeitung!
This weekend, the Süddeutsche Zeitung published a three-page dossier on the topic of affective computing. That Navel plays an important role in it and is even featured on the front page is a great honor for us. The text by Andrian Kreye discusses the new possibilities of machines to recognize […]

Navel performs at the annual reception of the Evangelische Heimstiftung
The Evangelische Heimstiftung, with its approximately 10,000 employees, has a nice tradition of having a reception at the beginning of the year with all management and leadership. The Christian guiding principles and strategic themes of the year are presented. And this year Navel was able to play an important role […]

Navel at RO-MAN 2022 in Naples
RO-MAN is one of the most important international conferences in the field of Human Robot Interaction (HRI). At this year’s conference in Naples, we were able to present Navel to researchers internationally for the first time. Navel’s eyes impressed the researchers the most. The liveliness and small saccade movements, the […]
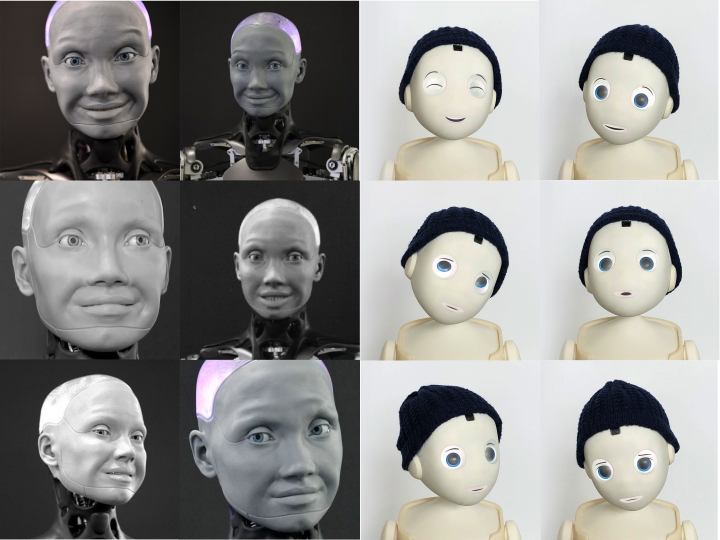
Ameca vs. Navel
Because we are asked from time to time if our concept is outdated and android robots like Ameca are the future, here are a few thoughts. Ameca is cool. What Engineered Arts has achieved is very impressive, especially technically. However, we need to differentiate between technically impressive and emotionally winning. […]

Navel wins hearts at the Pflege PLUS trade fair
We showed Navel to the nursing trade public at the PflegePLUS trade fair from 17 to 19 May and received a lot of positive feedback. The Evangelische Heimstiftung, one of the largest public institutions in Germany, invited us to present our start-up and Navel to the professional audience for the […]

nonverbal capabilities and dialog strategies
https://nextcloud.navelrobotics.com/index.php/s/oRJt5WpwJsqxyGB/download#t=3 In this demo we show the current state of NAVEL’s nonverbal and verbal dialog capabilities. There were a total of two recording sequences from which the demo is cut together. As a technical basis for the dialog system, we use RASA, which uses various AI modules for both the […]
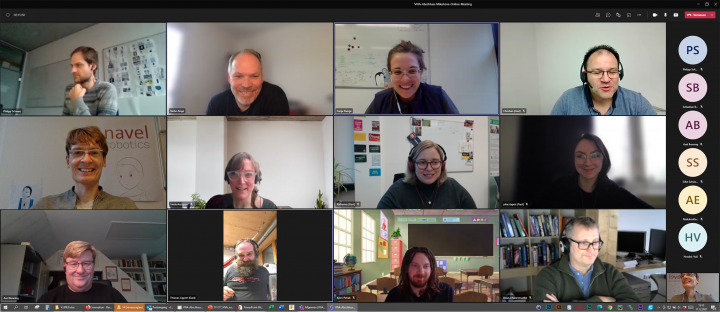
VIVA research project completed
On 17th of December 2021 we had our last team meeting. The almost three and a half years went by much too quickly. The BMBF research project VIVA officially ended at the end of December. Due to the Corona pandemic, the project could not be implemented 1:1 as originally planned. […]
Körber Foundation: My Friend the Robot
The Körber Foundation asked us to present our robot NAVEL on their thematic series “Logged in”. Together with Arne Manzeschke, professor of anthropology and ethics, and the moderator Katharina Heckendorf, we discussed the social potentials and risks that social robots have. We need to be especially mindful of vulnerable user […]

our wheel platform
https://nextcloud.navelrobotics.com/index.php/s/57dQdWYWESC24QW/download we have developed another locomotion platform for our social robot, which allows the tall robot figure to ride dynamically despite a small footprint, while always remaining stable. Stay tuned.